<This page is in progress>
Full Prototype Assembly
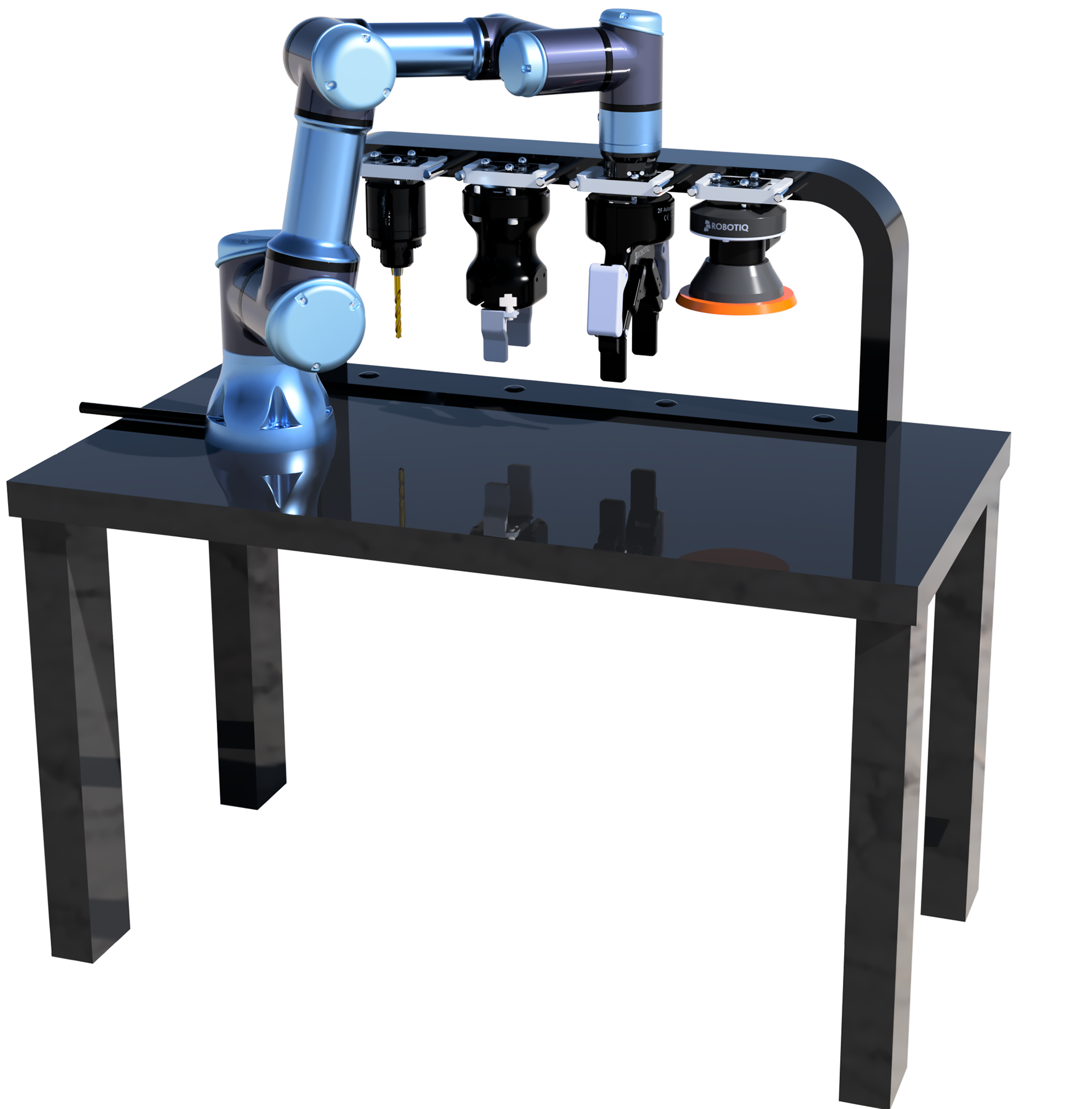
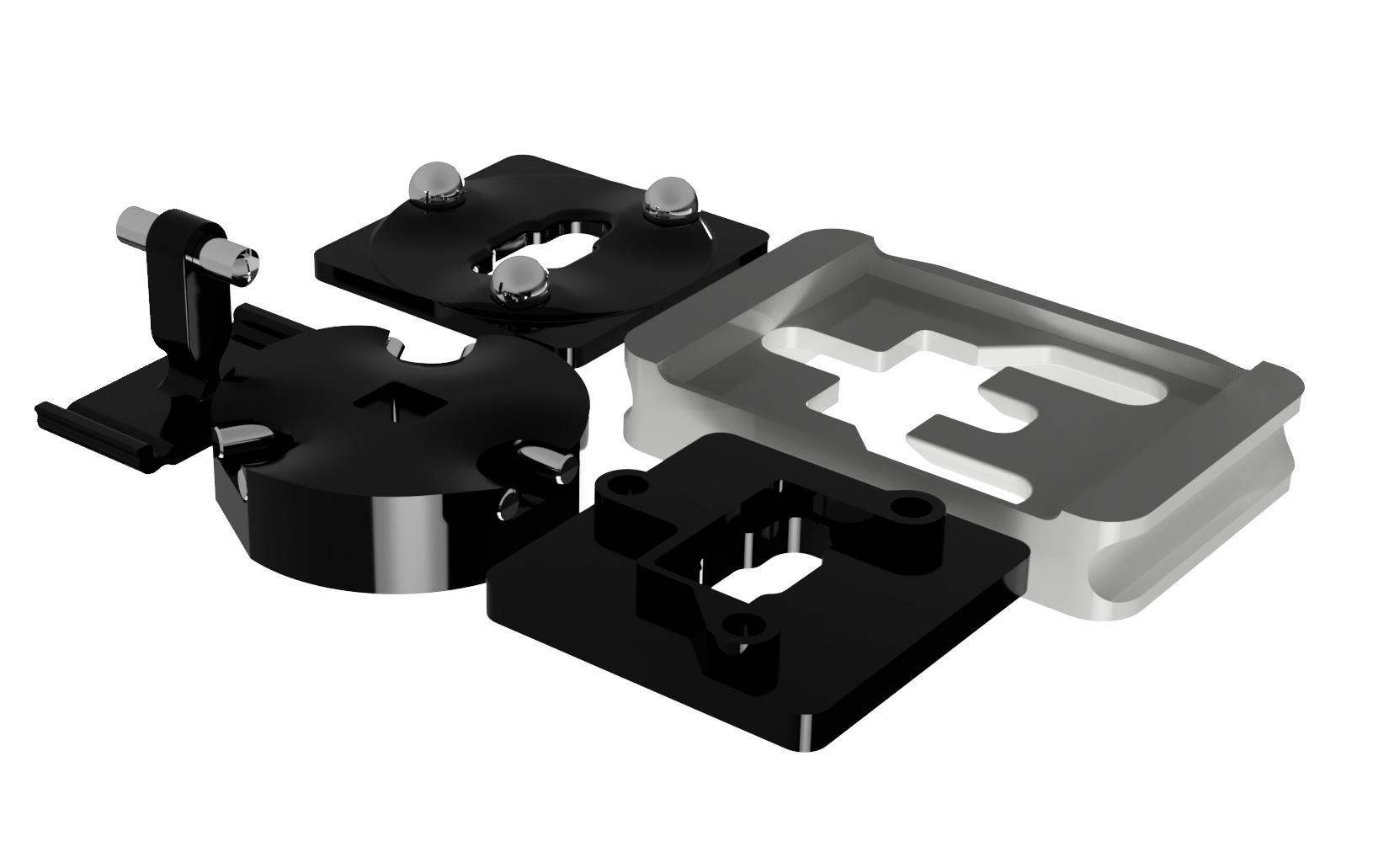
I designed a fully passive robot arm tool changer that relies on arm motion to lock. The system is entirely 3D printed, uses off-the-shelf hardware, can be fabricated onsite for under $10 in purchased parts. Unlike other systems, it doesn't require an additional rotary axis on the wrist or a pneumatic actuator.
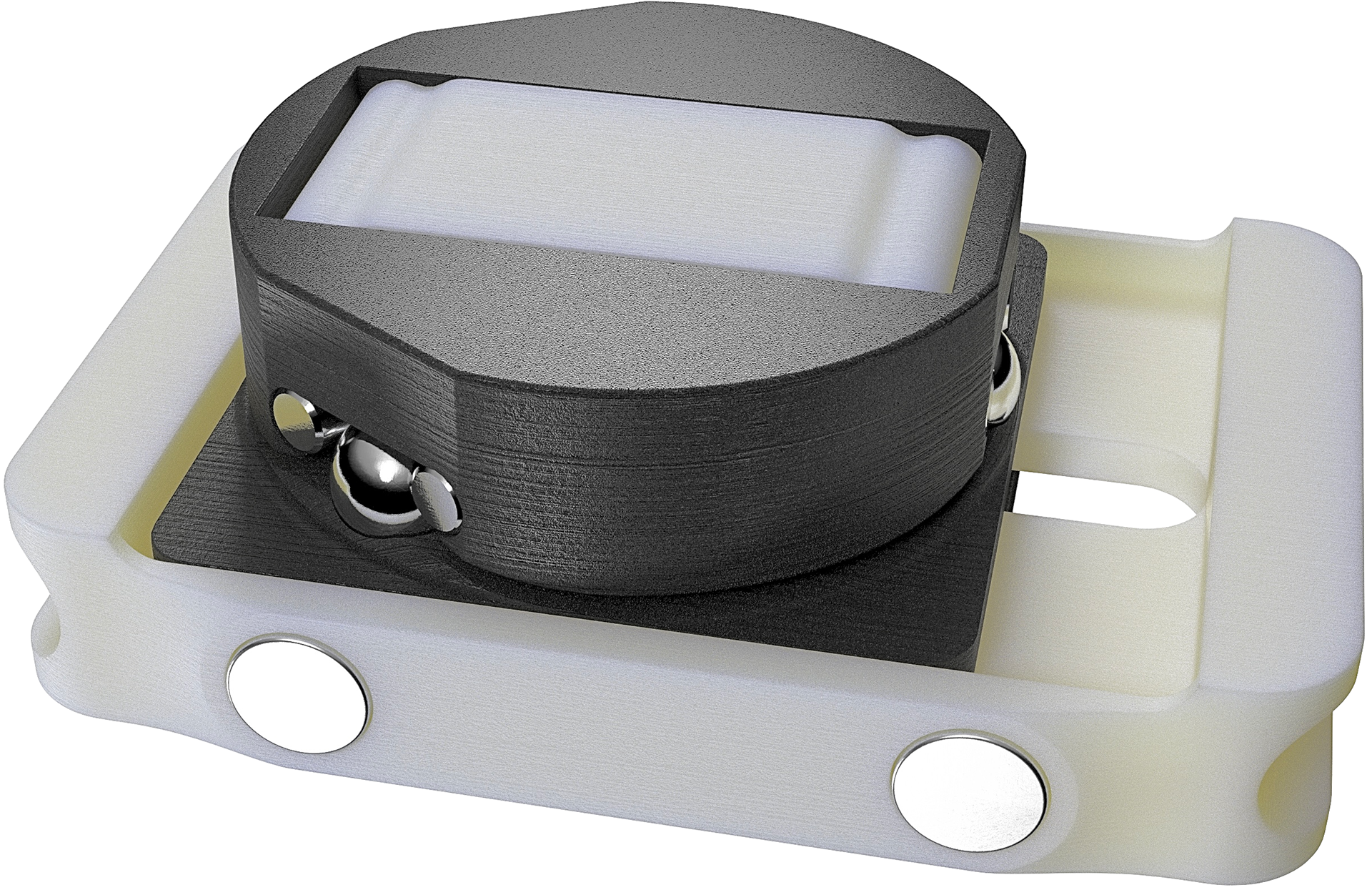
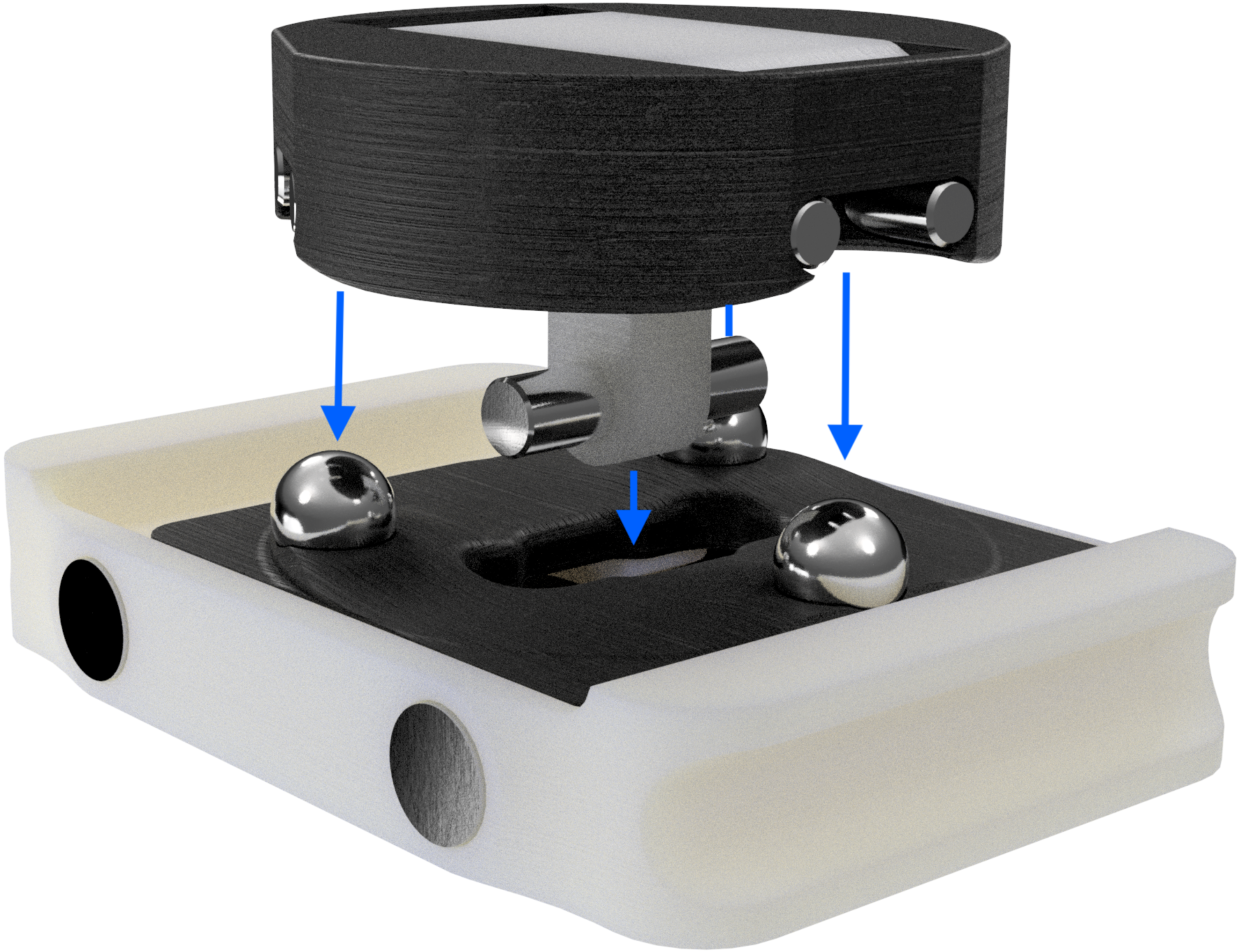
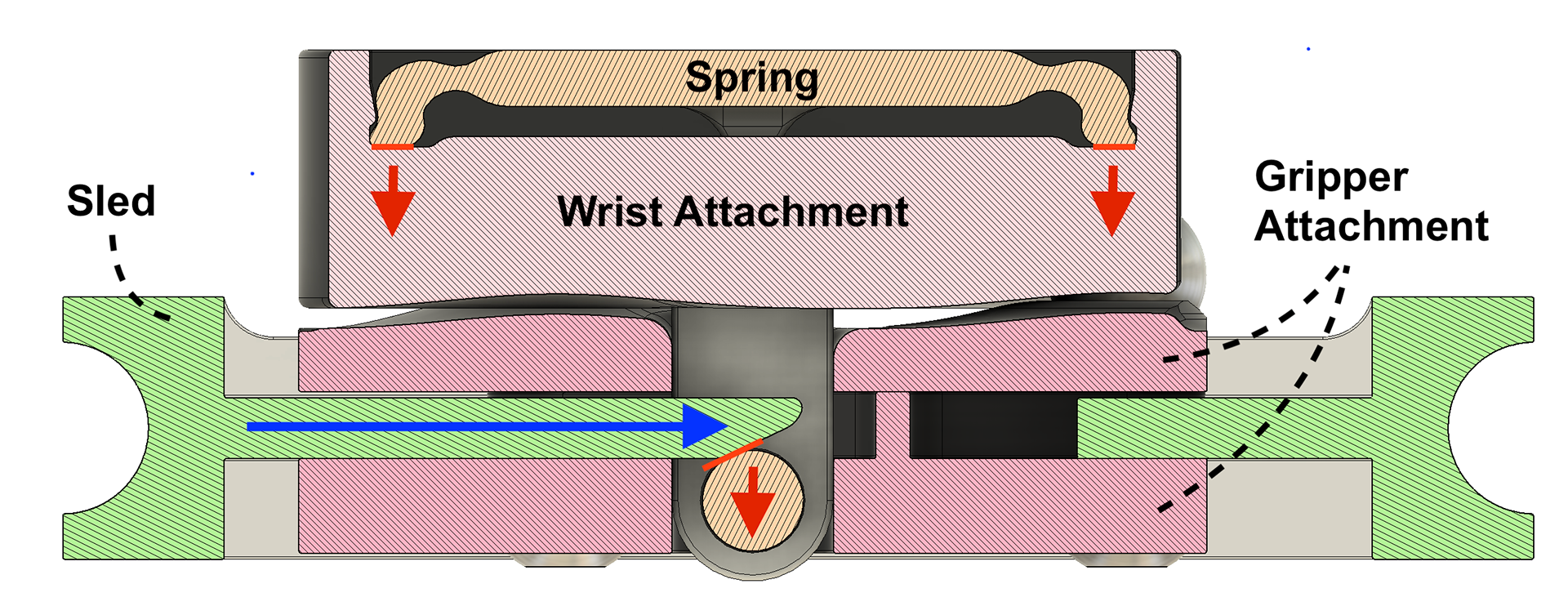
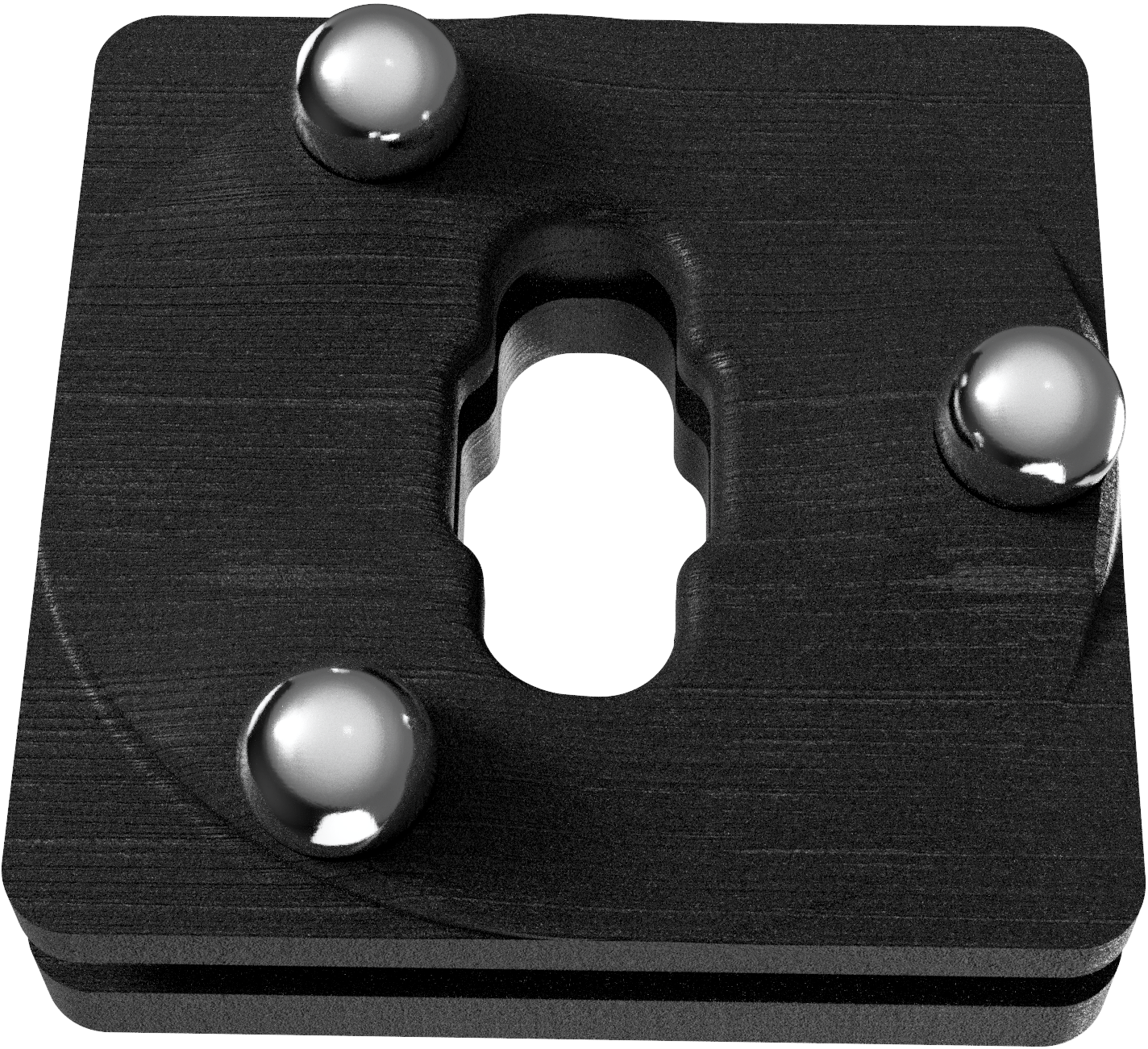
During docking, the Wrist Attachment Assembly lowers onto the Gripper Attachment Assembly and slides laterally into place. A dowel pin on the Wrist Attachment engages a wedge feature on the Sled, causing a clamping force that pulls the two assemblies together. Repeatable positioning is achieved by a Maxwell-style coupling that uses dowel pins and threaded steel balls as hard contact points.
Cylindrical slots on either side of the Sled mate with matching pins on the Dock, while embedded magnets keep the Gripper Attachment Assembly in place when the tool is not in use.
A compliant latch provides retention after the sled completes its travel. As the sled moves relative to the Wrist Attachment, it deflects the spring latch, which then snaps into place and prevents the assembly from backing out.

Spring
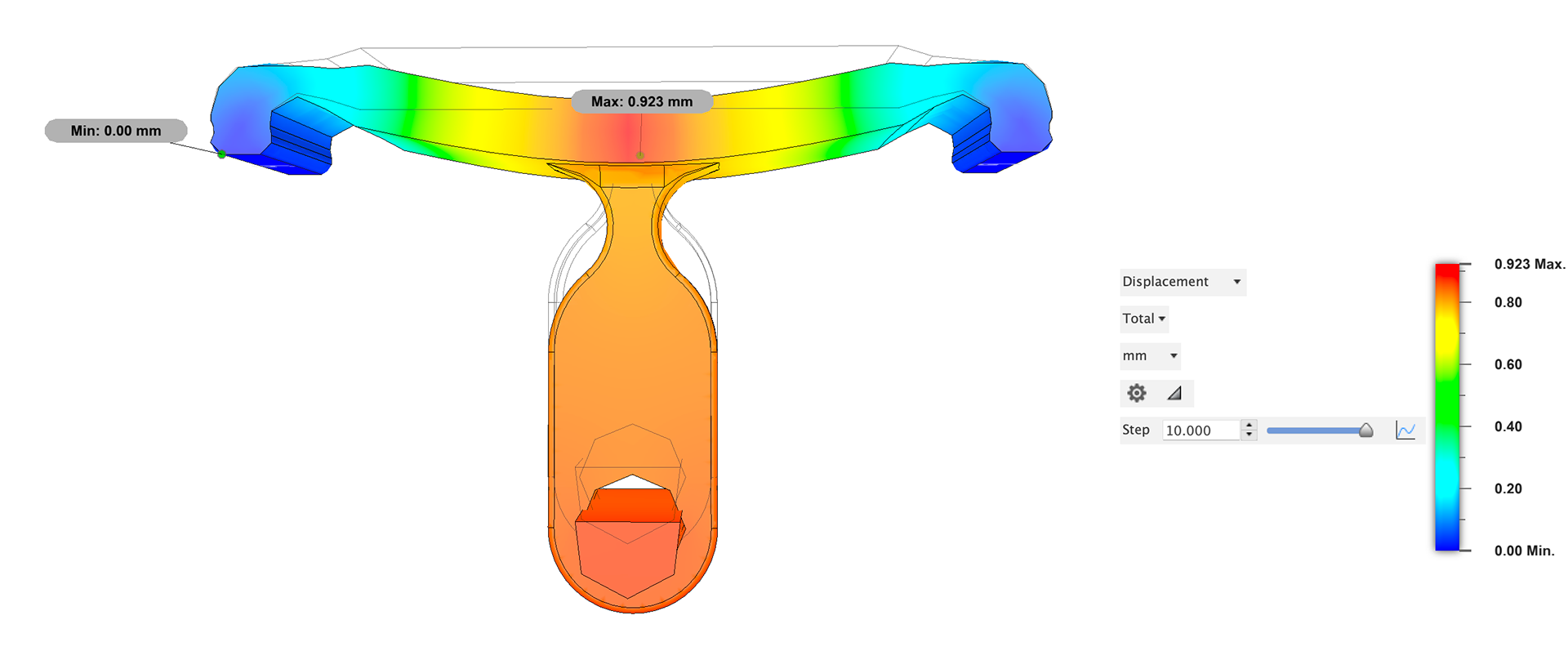
Displacement graph of Spring from FEA simulation in Fusion360
Assemblies:
Wrist Attachment Assembly, Top View

Wrist Attachment Assembly, Bottom View

Gripper Attachment Assembly
(in locked position)

Gripper Attachment Assembly
(in unlocked position)
Sub-Assemblies:
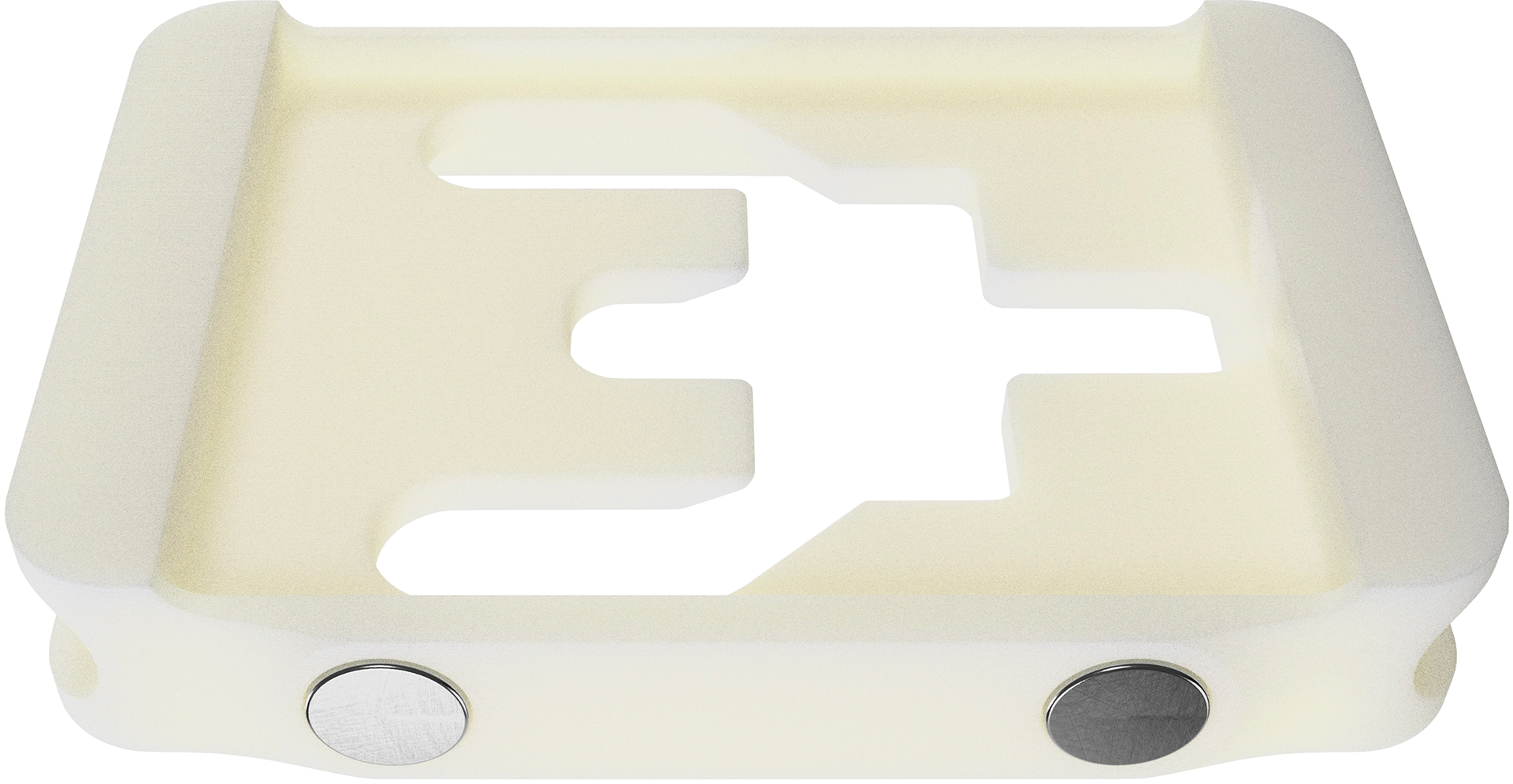
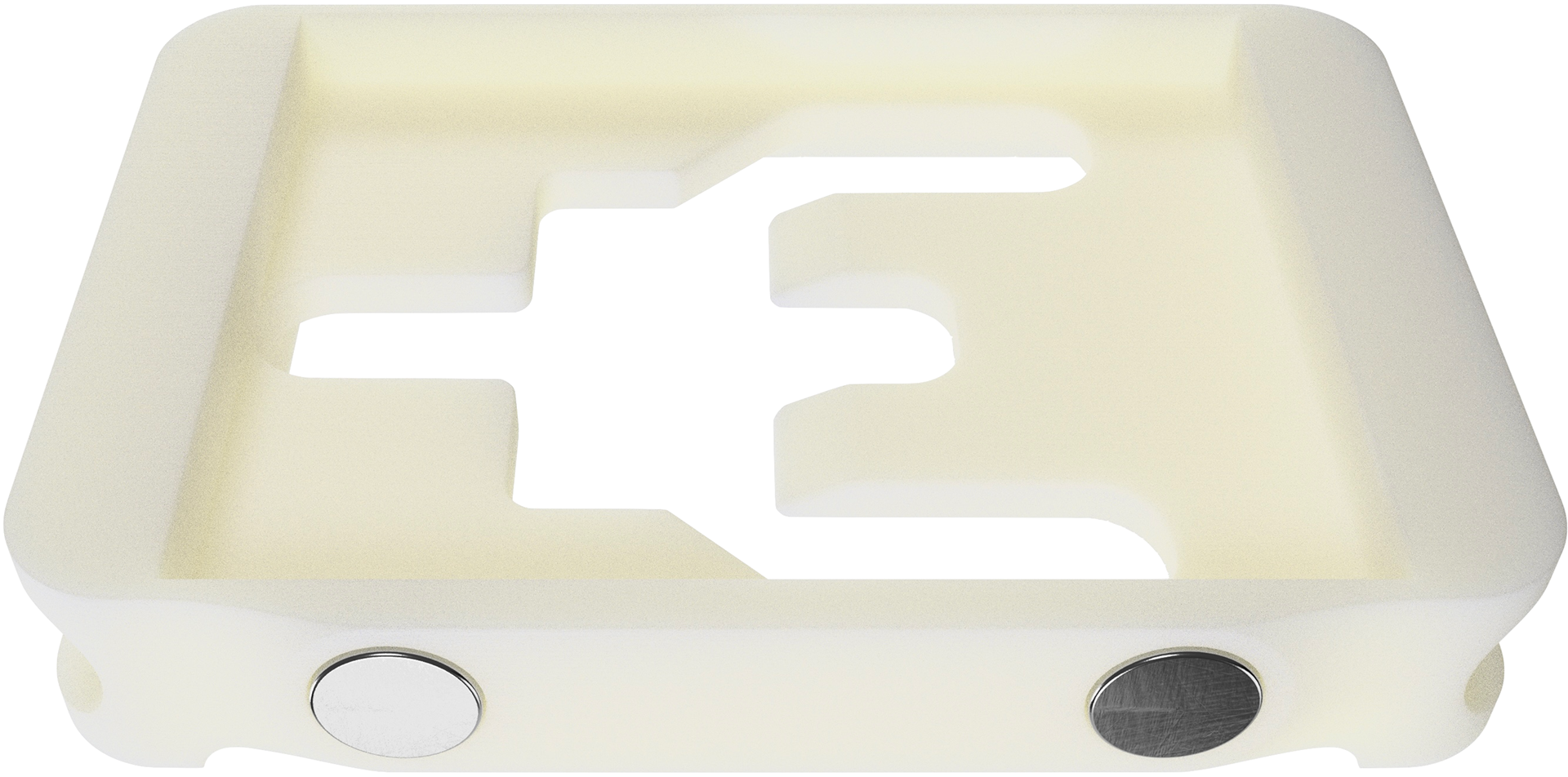
Wrist Attachment, Top View

Wrist Attachment, Bottom View
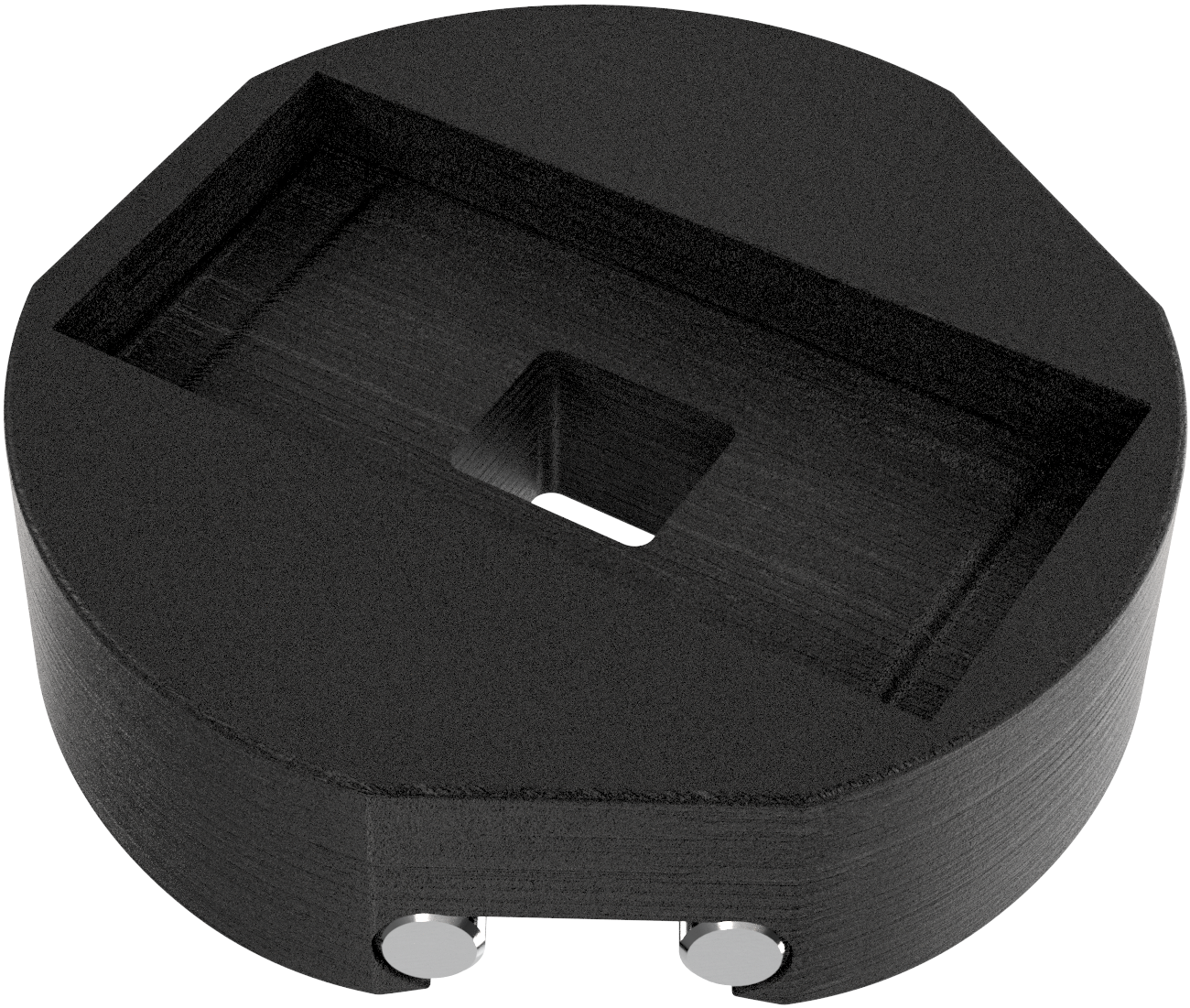
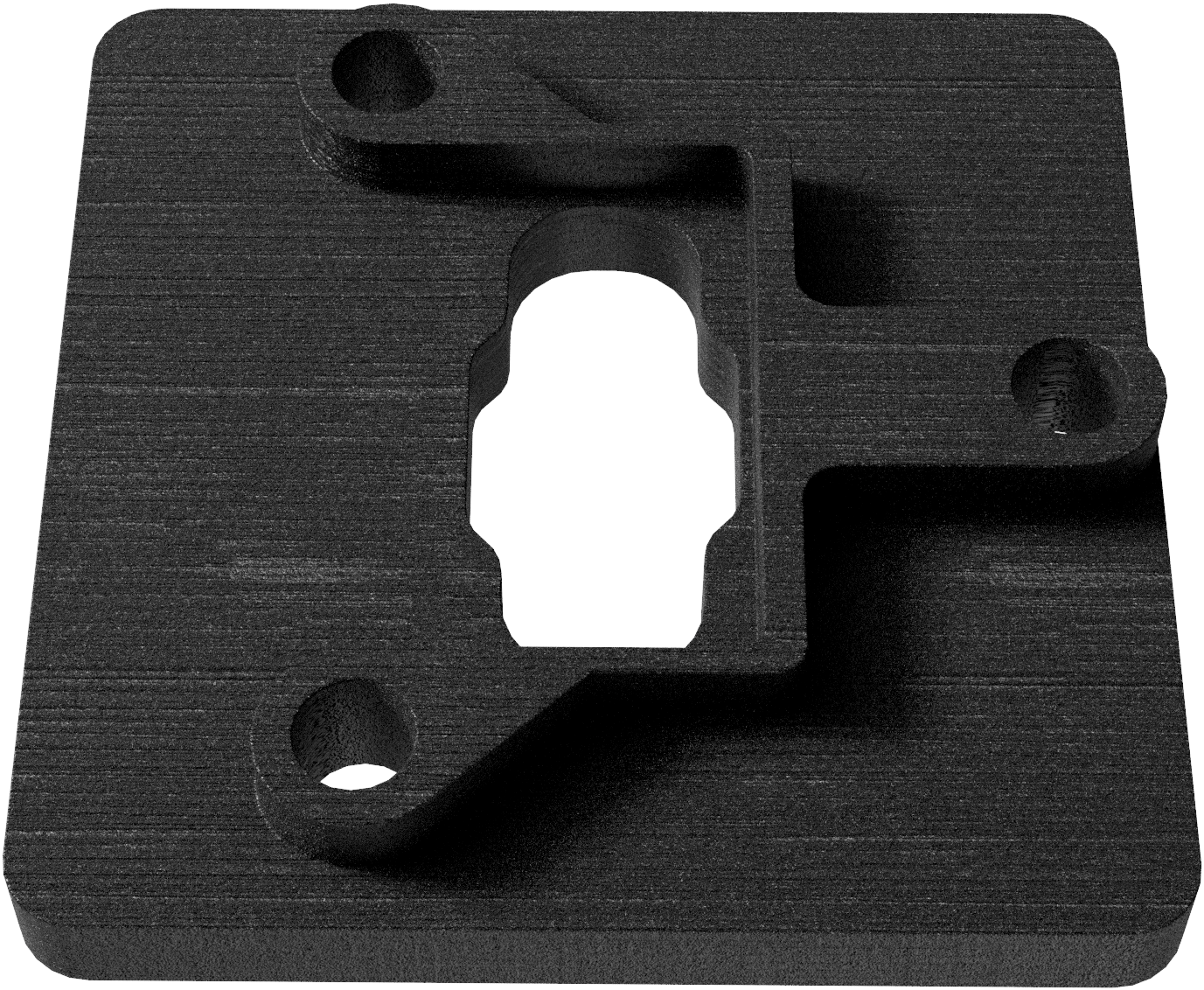
Gripper Attachment, Top View

Gripper Attachment, Bottom View
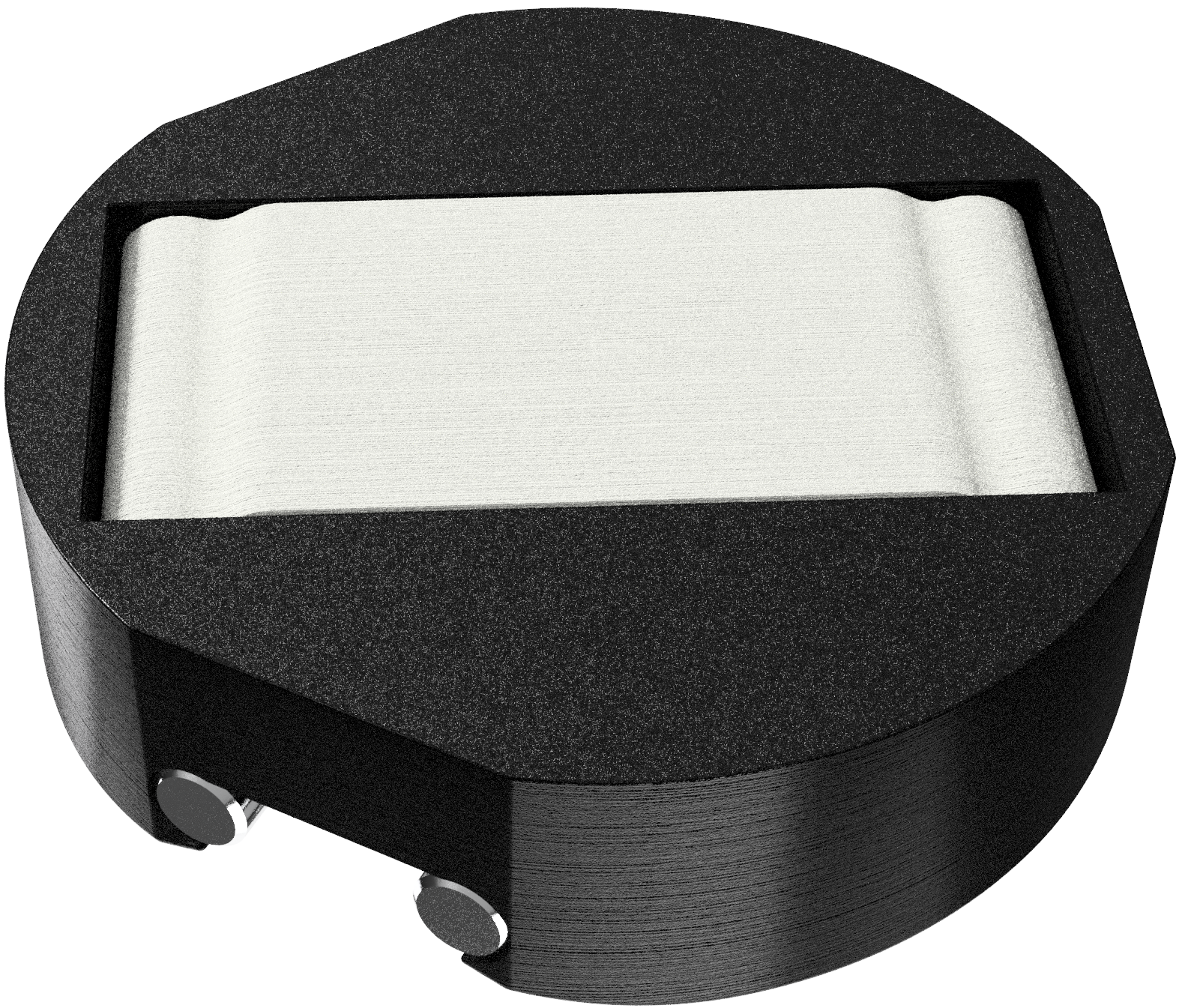
Sled Assembly, Top View
Sled Assembly, Bottom View

Spring Assembly, Top View
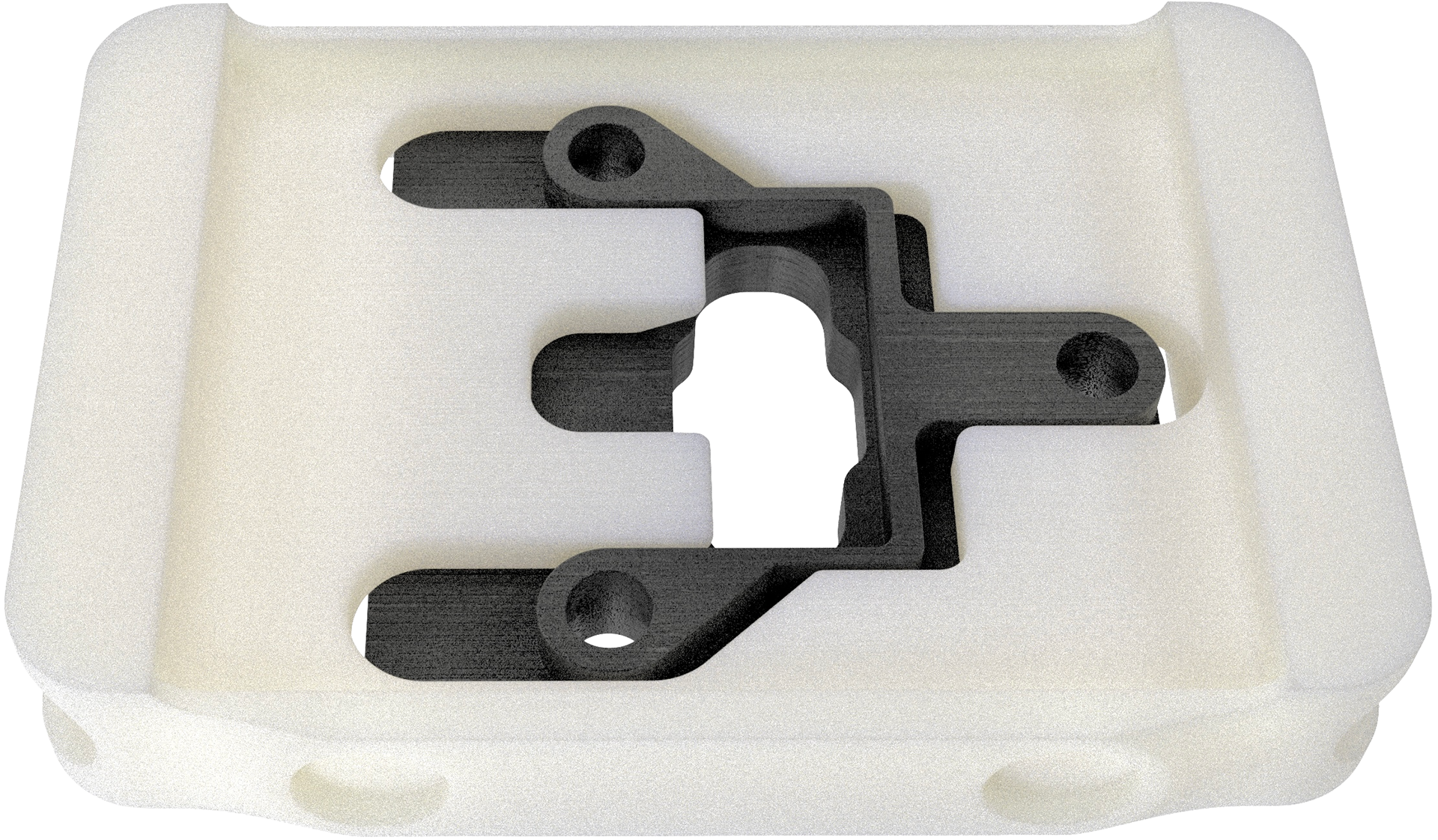
The gripper attachment consists of these two pieces that encapsulate the sled:

Gripper Attachment Upper Piece
Gripper Attachment Lower Piece
The Gripper Attachment Lower Piece and Sled are shaped to allow for sliding back and forth:
Better video to come soon... 😅